





모든 제품
-
 터키로부터의 테이펀태양 열펌프 인버터는 매우 상등품에 정말로 있고 우리가 또한 전시회를 위해 약간의 광고 제품으로 준비합니다. 우리는 곧 새로운 질서를 할 것입니다. 그곳의 작년은 한 지역 에이전트 일 뿐이고 올해 8 이상이 있습니다. 그들의 일부는 베이콩만을 팝니다!
터키로부터의 테이펀태양 열펌프 인버터는 매우 상등품에 정말로 있고 우리가 또한 전시회를 위해 약간의 광고 제품으로 준비합니다. 우리는 곧 새로운 질서를 할 것입니다. 그곳의 작년은 한 지역 에이전트 일 뿐이고 올해 8 이상이 있습니다. 그들의 일부는 베이콩만을 팝니다! -
 칠레로부터 크리스티안너무 맛있는데요! LCD 선택은 사용하는 것을 더욱더 쉽게 만듭니다. 그것은 사용의 쉬운 장점입니다. 그리고 강건합니다. 위대한 PC 소프트웨어.
칠레로부터 크리스티안너무 맛있는데요! LCD 선택은 사용하는 것을 더욱더 쉽게 만듭니다. 그것은 사용의 쉬운 장점입니다. 그리고 강건합니다. 위대한 PC 소프트웨어. -
 시리아로부터의 브라힘 아사드VFD500 출력 주파수는 다른 사람이 변동하고 있을 때 안정적입니다. 또한 출력 전류는 다른 사람 이하입니다, 그것이 어느 것이 더 에너지를 절약할 수 있는 출력 주파수가 또한 더 높은 이유입니다.
시리아로부터의 브라힘 아사드VFD500 출력 주파수는 다른 사람이 변동하고 있을 때 안정적입니다. 또한 출력 전류는 다른 사람 이하입니다, 그것이 어느 것이 더 에너지를 절약할 수 있는 출력 주파수가 또한 더 높은 이유입니다.
담당자 :
Terry
전화 번호 :
008613910001000
WhatsApp :
+8613923735888
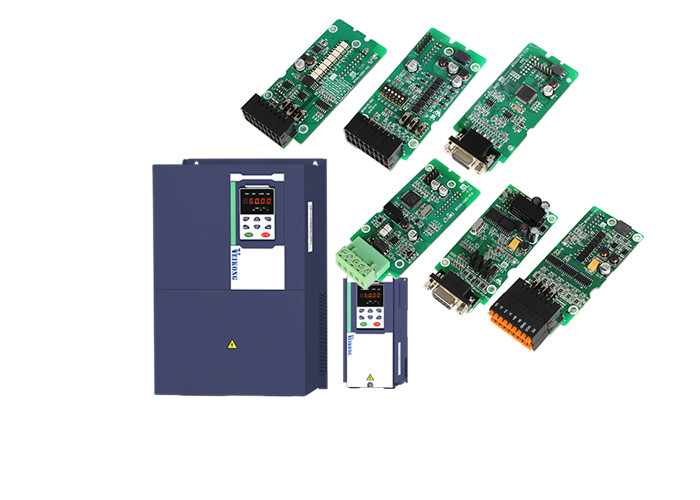
3상 단일 상 VFD 가변 방식 드라이브 30 kw 40 에이치피








제품 상세 정보
| 전압 | 380V/220V | 힘 | 30Kw/40hp |
|---|---|---|---|
| 제어 모드 | V/F 제어, 벡터 제어 | 보호 수준 | IP20/ IP65 |
| 코묑치아톤 | Modbus485 캔오픈 프로피넷 | 키패드 | LED 키패드, LCD 키패드, 듀얼 디스플레이 키패드 |
| 강조하다 | VFD 가변 방식 드라이브 30 kw,VFD 가변 방식 드라이브 3시 40분 에이치피,단일 상 40 에이치피 vfd |
||
제품 설명
30 kw 40 에이치피 220v 380v 가변 주파수는 VFD 3상 단일 상을 운전합니다
VEIKONG VFD500 기술 데이터 :
| 항목 | 명세서 | |
| 입력 | 이누푸트 전압 |
1 phase/3phase 220V :200V~240V 3 단계 380V-480V :380V~480V |
| 허락된 전압 변동값 범위 | -15%~10% | |
| 입력 주파수 | 50Hz / 60Hz, 변동 5% 이하 | |
| 출력 | 출력 전압 | 3개 단계 :0~input 전압 |
| 과부하 용량 |
범용 애플리케이션 :정격 전류 중 150%를 위한 60대 저 부하 적용 :정격 전류 중 120%를 위한 60대 |
|
| 제어 | 제어 모드 |
V/f 제어 부모 동반 카드(SVC) 없는 몰지각한 흐름 벡터 제어 센서 속도 플럭스 벡터는 부모 동반 카드 (VC)로 통제합니다 |
| 작동 모드 | 속도 제어, 토크 제어 (SVC와 VC) | |
| 속도 범위 |
1:100 (V/f) 1:200 (서비스) 1:1000 (VC) |
|
| 속도 제어 정확도 |
±0.5% (V/f) ±0.2% (서비스) ±0.02% (VC) |
|
| 응답 속도 |
5Hz(V/f) 20Hz(SVC) 50Hz(VC) |
|
| 주파수 범위 |
0.00~600.00Hz(V/f) 0.00~200.00Hz(SVC) 0.00~400.00Hz(VC) |
|
| 입력 주파수 결의안 |
디지털 설정 : 0.01 Hz 아날로그 설정 : 최대 주파수 X 0.1% |
|
| 벤처기업 토크 |
150%/0.5Hz(V/f) 180%/0.25Hz(SVC) 200%/0Hz(VC) |
|
| 토크 제어 정확도 |
SVC :5Hz10%, 위쪽에 5Hz5% 이내에 VC :3.0% |
|
| V/f는 구부러집니다 |
V / F 곡선 타입 : 직선, 다중 지점, 전력 기능, V / F 분리 ; 토크 부스트 지원 : 자동 토크 부스트 (공장의 설정), 매뉴얼 토크 부스트 |
|
| 경사로를 주는 주파수 |
선인 지원과 S 곡선 가속과 감속 ; 가속 그리고 감속 시간 설정 범위 0.00s ~ 60000s의 4개 그룹 |
|
| 직류버스 전압 제어기 |
과전압 실속 제어 : 전압 결점을 건너 뛰기를 회피하기 위해 출력 주파수를 조정함으로써 모터의 발전을 제한하세요 ;
부족 전압 실속 제어 : 편요 실패를 피하기 위한 출력 주파수를 조정함으로써 모터의 소비 전력을 제어하세요
프d맥스 제어 : 초과 전압 여행을 피하기 위한 출력 주파수를 조정함으로써 모터에 의해 발생된 동력 량을 제한하세요 ; 프d민 제어 : 약진 부족 전압 결점을 회피하기 위해, 출력 주파수를 조정함으로써 모터의 소비 전력을 제어하세요 |
|
| 운반기 주파수 | 1kHz~12kHz (타입에 의존하는 바리스) | |
| 개시법 |
직접적 스타트는 (통조림으로 만들고 중첩된 DC 브레이크입니다) ; 속도 추적 시작 |
|
| 중지 방법 | 감속은 멈춥니다 있을 수 있고 DC 제동을 중첩시켰습니다) ; 멈추는 것을 자유롭게 합니다 | |
| 마인컨트롤 기능 | 조깅 통제, 축 늘어짐 통제, 최고 16까지 속도 조작, 위험한 속도 무효, 변동 주파수 작동, 가속과 자극 제동 위에서, 감속 타임 스위칭, VF 분리, 과정 피드 제어, 수면과 웨이크업 기능, 짜맞춘 단순한 PLC 논리, 사실상 입/출력 단, 내장 딜레이 부대, 짜맞춘 비교부와 논리부, 매개 변수 백업과 회수, 완전한 결점 기록, 결점 리셋, 자동차 패러미터프리스위칭, 소프트웨어 교환 출력 배선, 단말기 업 / 우여곡절의 2개 그룹 | |
| 기능 | 키패드 | LED 디지털 건반과 LCD 키패드(선택) |
| 통신 |
표준 : 모드 버스 통신 (개발에서) 열리고 PROFINET |
|
| 부모 동반은 카드를 냅니다 | 증분형 엔코더는 카드 (차동 출력과 개방 컬렉터)을 조화시킵니다, 로터리 트랜스포머가 카드를 냅니다 | |
| 정보 입력 단말 |
표준 : 그 중에 하나가 고속 펄스입력 최고 50kHz를 지원하는 5개의 디지털 입력 터미널 ; 2 아날로그 입력 단자가 0 ~ 10V 전압 입력 또는 0 ~ 20mA 전원 입력을 지원합니다 ; 옵션 카드 : 4개의 디지털 입력 터미널 2개의 아날로그 입력 terminals.support-10V-+10V 전압 입력 |
|
| 비단자 |
표준 : 1개의 디지털 출력 터미널 ; 1개의 고속 펄스 출력 기구 터미널 (오픈 컬렉터 타입)이 0 ~ 50kHz 광장 웨이브 신호 출력을 지원합니다 ; 1 릴레이 출력 단말기 (두번째 중계기가 선택입니다) 2개의 아날로그 출력 터미널이 0 ~ 20mA 현 생산량 또는 0 ~ 10V 전압 출력을 지원합니다 ; 옵션 카드 : 4개의 디지털 출력 터미널 |
|
| 보호 | 방지 기능을 위해 6 장 문제해결과 대응책을 언급하세요 | |
| 환경 | 설치 위치 | 실내이, 어떤 직사광선, 먼지, 부식성 가스, 연소성 가스, 석유 연기, 증기, 물방울 또는 소금. |
| 높이 | 높이가 100m까지 증가하면 0-3000m.inverter는 높이 더 높은 than1000m과 정격 출력 전류가 1%까지 감소할 것인지 낮춰지게 될 것입니다 | |
| 대기 온도 | -10' C~ +40' C, 온도가 1' C까지 증가하면 최대 50' C (대기 온도가 40' C와 50' C의 사이에 있다면 낮춰지게 되) 정격 출력 전류는 1.5%까지 감소합니다 | |
| 습도 | 압축되는 것 없이, 95%RH 이하 | |
| 진동 | 5.9 m/s2 (0.6 g) 이하 | |
| 저장 온도 | -20' C ~ +60' C | |
| 다른 사람 | 설치 | 트랜스무럴인 벽에 붙여진, 바닥 통제된 상자 |
| 보호 수준 | IP20 | |
| 냉각 방식 | 강제 공기 냉각 | |
| EMC | CE ROHS |
내부 EMC 필터 EN61800-3에 따릅니다 범주 C3 3번째 환경 |
일반 어플리케이션에서 유명한 브랜드 vfd를 대체하세요.
![]()
PID 기능
| 40이지 그룹 PID 기능 | ||||
| r40.00 | PID 최종 출력 값 | 유일한 한 부분을 읽으세요 :0.1% | - | ● |
| r40.01 | PID 최종류 가치 | 유일한 한 부분을 읽으세요 :0.1% | - | ● |
| r40.02 | PID 마지막 피드백 값 | 유일한 한 부분을 읽으세요 :0.1% | - | ● |
| r40.03 | PID 일탈값 | 유일한 한 부분을 읽으세요 :0.1% | - | ● |
| P40.04 | PID 참조 출처 |
유닛의 디지트 :PID 주요 참조 원천(ref1) 0 : 디지티탈 설정 1 : AI1 2 : AI2 3 : AI3 (IO 확장 보드) 4 : AI4 (IO 확장 보드) 5 : HDI 고주파 펄스 6 : 통신 10 자릿수 :부대의 디지트와 마찬가지인 PID 보조의 참조 출처 (ref2) |
00 | ☆ | |||||||||||||||
| P40.05 | 피드백 범위를 받은 PID | 0.01~655.35 | 100.00 | ☆ | |||||||||||||||
| P40.06 | 0에서 설정하는 PID 디지털 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
| P40.07 | 1에서 설정하는 PID 디지털 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
| P40.08 | 2에서 설정하는 PID 디지털 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
| P40.09 | 3에서 설정하는 PID 디지털 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
|
PID 참조 출처가 디지털 설정일 때, PID 디지털 설정 0~3은 DI 단자 역할 43 (사전 설정 PID 단말기 I)와 44 (사전 설정 PID 단자 2)에 의존합니다 :
예를 들면 다음 언제 AI1이 PID 피드백으로서 사용되는지, 면 전체 범위가 16.0 킬로그램 압력에 해당되고, 피드 제어가 8.0 킬로그램이도록요구하 ; 그리고 나서 16.00에 P40.05 PID 피드백 범위에서 설정하시오 그러면 PID 디지털 레퍼런스 터미널은 8.00이라는 것 P40.06, 지정된 P40.06에 (0에서 설정하는 PID 사전 설정을) 선택합니다
|
|||||||||||||||||||
|
PID 참조 출처가 디지털 설정일 때, PID 디지털 설정 0~3은 DI 단자 역할 43 (사전 설정 PID 단말기 I)와 44 (사전 설정 PID 단자 2)에 의존합니다 :
예를 들면 다음 언제 AI1이 PID 피드백으로서 사용되는지, 면 전체 범위가 16.0 킬로그램 압력에 해당되고, 피드 제어가 8.0 킬로그램이도록요구하 ; 그리고 나서 16.00에 P40.05 PID 피드백 범위에서 설정하시오 그러면 PID 디지털 레퍼런스 터미널은 8.00이라는 것 P40.06, 지정된 P40.06에 (0에서 설정하는 PID 사전 설정을) 선택합니다
|
||||||||||||||||||||
| P40.10 | PID 참조 출처 선택 | 0 : ref1 1 : ref1+ref2 2 : ref1-ref2 3 : ref1*ref2 4 : ref1/ref2 5 : Min(ref1,ref2) 6 : Max(ref1,ref2) 7(ref1+ref2)/2 8 : fdb1and fdb2 전환 |
0 | ☆ | ||||||||||||||||
| P40.11 | PID 피드백 source1 |
유닛의 디지트 0 :PID 피드백 source1(fdb1) 0 : AI1 1 : AI2 2 : AI3 (옵션 카드) 3 : AI4 (옵션 카드) 4 : pluse(HDI) 5 : 통신 6 : 자동차 정격 출력 전류 7 : 자동차 정격출력주파수 8 : 자동차 정격 출력 회전력 9 : 자동차 정격출력주파수 10 자릿수 : PID 피드백 source2 (fdb2) 유닛의 디지트와 마찬가지로 |
00 | ☆ | ||||||||||||||||
| P40.13 | PID 피트백 기능 선택 | 0 : fdb1 1 : fdb1+fdb2 2 : fdb1-fdb2 3 : fdb1*fdb2 4 : fdb1/fdb2 5 : Min(fdb1,fdb2) 판매액 fdb1.fdb2 더 작은 가치 6 : Max(fdb1,fdb2) 판매액 fdb1.fdb2 더 큰 가치 7 : (ref1+ref2)/2 8 : fdb1and fdb2 전환 |
0 | ☆ | ||||||||||||||||
| P40.14 | PID 출력 특징 |
0 : PID 출력은 긍정적입니다 : 피드백 신호가 PID 기준값을 초과할 때, 인버터의 출력 주파수는 PID를 균형화시키기 위해 감소할 것입니다. 예를 들면, 요약 동안 긴장 피드 제어 1 : PID 출력은 부정적입니다 : 피드백 신호가 PID 기준값 보다 더욱 강할 때, 인버터의 출력 주파수는 PID를 균형화시키기 위해 증가할 것입니다. 예를 들면, 랩다운 동안 긴장 피드 제어 |
0 | ☆ | ||||||||||||||||
|
PID 출력 특성은 P40.14와 Di 단말기 42 기능 PID 긍정적 / 부정적 스위칭에 의해 결정됩니다 : P40.14 = 0과 "42 : PID 긍정적 / 부정적 스위칭 " 단말기는 무효입니다 : : PID 출력 특성은 긍정적입니다 P40.14 = 0과 "42 : PID 긍정적 / 부정적 스위칭 " 단말기는 유효합니다 : : PID 출력 특성은 부정적입니다 P40.14 = 1과 "42 : PID 긍정적 / 부정적 스위칭 " 단말기는 무효입니다 : : PID 출력 특성은 부정적입니다 P40.14 = 1과 "42 : PID 긍정적 / 부정적 스위칭 " 단말기는 유효합니다 : : PID 출력 특성은 긍정적입니다 |
||||||||||||||||||||
| P40.15 | PID 출력의 상한 | -100.0%~100.0% | 100.0% | ☆ | ||||||||||||||||
| P40.16 | PID 생산량의 하한 | -100.0%~100.0% | 0.0% | ☆ | ||||||||||||||||
| P40.17 | 프로포르타이오날 획득 KP1 |
0.00~10.00 기능은 PID 입력의 비례 이득 P에 적용됩니다. P는 전체 PID 조절기의 힘을 결정합니다. 100의 매개 변수는 언제 PID의 벌충이 피드백하고 값이 100%라고 고려해 볼 때, PID의 조절 범위는 조정되는지 맥스인 것을 의미합니다. 주파수 (적분함수와 차별적 기능을 무시합니다).
|
5.0% | ☆ | ||||||||||||||||
| P40.18 | 적분 시간 TI1 |
0.01s~10.00s 이 매개 변수는 PID 피드백과 참조의 일탈에 필수적 조정을 수행하기 위해 PID 조정자의 속도를 결정합니다. PID의 일탈이 피드백과 참조는 100%일 때, 필수적 조정자는 맥스를 달성하기 위해 시간 뒤에 끊임없이 일합니다 (비례 영향과 차별적 효과를 무시하 ). 주파수 (P01.06) 또는 맥스. 전압 (P12.21). 적분 시간 짧게, 더가 더 강합니다 조정
|
1.00s | ☆ | ||||||||||||||||
| P40.19 | 시간차 TD1 |
0.000s~10.000s 이 매개 변수는 PID 조정자가 PID 피드백과 참조의 일탈에 필수적 조정을 수행할 때 변화 비율의 강도를 결정합니다. 만약 PID 피드백이 시간 동안 100%를 바꾸면, 필수적 조정자 (비례 영향과 차별적 효과를 무시하 )의 조정이 맥스입니다. 주파수 (P01.06) 또는 맥스. 전압 (P12.21). 적분 시간 오랫동안, 조절이 더 강합니다.
|
0.000s | ☆ | ||||||||||||||||
| P40.20 | 프로포르타이오날 획득 KP2 | 0.00~200.0%. | 5.0% | ☆ | ||||||||||||||||
| P40.21 | 적분 시간 TI2 |
0.00s (어떤 어떠한 적분 영향) ~20.00s
|
1.00s | ☆ | ||||||||||||||||
| P40.22 | 시간차 TD2 | 0.000s~0.100s | 0.000s | ☆ | ||||||||||||||||
| P40.23 | pid 매개 변수 전환 조건 |
0 : 어떤 전환 TI1, TD1, 전환하고 KP1을 사용하지 않습니다 DI 단말기에 의해 전환하세요 KP1, TI1, TD1은 DI 단말기 41 번 기능이 무효일 때 사용됩니다 ; 유효할 때 KP2, TI2, TD2는 사용됩니다 KP1, TI1, TD1을 사용하여, PID 명령과 피드백 일탈의 절대치는 P40.24 이하입니다 ; KP2, TI2를 사용하여, 일탈의 절대치는 P40.25보다 더 큽니다, TD2가 매개변수화합니다 ; 일탈의 절대치는 P40.24~P40.25의 사이에 있습니다, 매개 변수의 두 세트가 선형으로 변화됩니다. |
0 | ☆ | ||||||||||||||||
| P40.24 | pid 매개 변수 전환 디베이션 1 | 0.0%~P40-25 | 20.0% | ☆ | ||||||||||||||||
| P40.25 | pid 매개 변수 전환 디베이션 2 | P40-24~100.0% | 80.0% | ☆ | ||||||||||||||||
추천된 제품

