





모든 제품
-
 터키로부터의 테이펀태양 열펌프 인버터는 매우 상등품에 정말로 있고 우리가 또한 전시회를 위해 약간의 광고 제품으로 준비합니다. 우리는 곧 새로운 질서를 할 것입니다. 그곳의 작년은 한 지역 에이전트 일 뿐이고 올해 8 이상이 있습니다. 그들의 일부는 베이콩만을 팝니다!
터키로부터의 테이펀태양 열펌프 인버터는 매우 상등품에 정말로 있고 우리가 또한 전시회를 위해 약간의 광고 제품으로 준비합니다. 우리는 곧 새로운 질서를 할 것입니다. 그곳의 작년은 한 지역 에이전트 일 뿐이고 올해 8 이상이 있습니다. 그들의 일부는 베이콩만을 팝니다! -
 칠레로부터 크리스티안너무 맛있는데요! LCD 선택은 사용하는 것을 더욱더 쉽게 만듭니다. 그것은 사용의 쉬운 장점입니다. 그리고 강건합니다. 위대한 PC 소프트웨어.
칠레로부터 크리스티안너무 맛있는데요! LCD 선택은 사용하는 것을 더욱더 쉽게 만듭니다. 그것은 사용의 쉬운 장점입니다. 그리고 강건합니다. 위대한 PC 소프트웨어. -
 시리아로부터의 브라힘 아사드VFD500 출력 주파수는 다른 사람이 변동하고 있을 때 안정적입니다. 또한 출력 전류는 다른 사람 이하입니다, 그것이 어느 것이 더 에너지를 절약할 수 있는 출력 주파수가 또한 더 높은 이유입니다.
시리아로부터의 브라힘 아사드VFD500 출력 주파수는 다른 사람이 변동하고 있을 때 안정적입니다. 또한 출력 전류는 다른 사람 이하입니다, 그것이 어느 것이 더 에너지를 절약할 수 있는 출력 주파수가 또한 더 높은 이유입니다.
담당자 :
Terry
전화 번호 :
008613910001000
WhatsApp :
+8613923735888
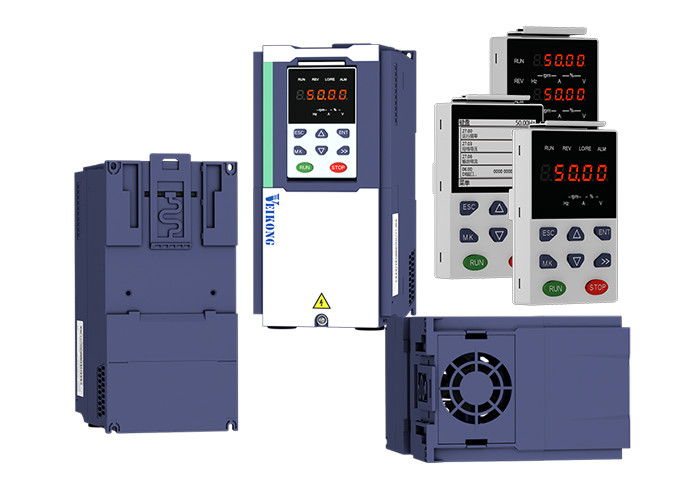
380v 4 kw 5 에이치피 가변 방식 드라이브 벡터 제어 인버터 VFD



제품 상세 정보
| 전압 | 380v/220v | 힘 | 4.4KW |
|---|---|---|---|
| 제어 모드 | V/F 제어, 벡터 제어 | 보호 수준 | IP20/ IP65 |
| 총 중량 | 2.1 킬로그램 | 음량 | 0.28M*0.15M*0.22M |
| 강조하다 | 380v 5 에이치피 가변 방식 드라이브,4 kw 벡터 제어 인버터,벡터 제어 5 에이치피 가변 방식 드라이브 |
||
제품 설명
380v 4 kw 5 에이치피 가변 방식 드라이브 벡터 제어 인버터 VFD
VFD500 기능과 기술 데이터 시트 :
안쪽 EMC C3 필터와 IO 확장 카드와 다른 종류의 부모 동반 카드를 위한 빌딩 블록 디자인으로, 1
hz 0.1 hz와 0 hz를 1 hz 0.5 hz 0.25 이내에 있는 토크에서 표현하는 우리의 업계의 2, 최고 성적
그것은 출력 토크를 위한 어떠한 국내 중국 브랜드과도 비교할 수 있습니다.
3, 원활한 실행과 안정이 선택적 LCD 키패드와 듀얼 디스플레이 키패드를 지원합니다. 지원 PC 툴즈.
4, 캔오픈 지원 modbus485, 프로피넷 전달.
불모지 없는 모터 위의 5, 낮은 소음과 0.1S 가속과 감속을 위한 빠른 응답
6, 반대이고 앞으로 무료 스위칭
조립된 PLC 프로그래밍에서 7, 자는 기능과 절전 기능
8, 장력 조정과 토크 모드 제어
9, 두 현대자동차 스위칭 제어를 실현할 수 있는 두 그룹 모터 매개변수를 지원하십시요
| 항목 | 명세서 | |
| 입력 | 이누푸트 전압 |
1 phase/3phase 220V :200V~240V |
| 허락된 전압 변동값 범위 | -15%~10% | |
| 입력 주파수 | 50Hz / 60Hz, 변동 5% 이하 | |
| 출력 | 출력 전압 | 3개 단계 :0~input 전압 |
| 과부하 용량 |
범용 애플리케이션 :정격 전류 중 150%를 위한 60대 |
|
| 제어 | 제어 모드 |
V/f 제어 |
| 작동 모드 | 속도 제어, 토크 제어 (SVC와 VC) | |
| 속도 범위 |
1:100 (V/f) |
|
| 속도 제어 정확도 |
±0.5% (V/f) |
|
| 응답 속도 |
5Hz(V/f) |
|
| 주파수 범위 |
0.00~600.00Hz(V/f) |
|
| 입력 주파수 결의안 |
디지털 설정 : 0.01 Hz |
|
| 벤처기업 토크 |
150%/0.5Hz(V/f) |
|
| 토크 제어 정확도 |
SVC :5Hz10%, 위쪽에 5Hz5% 이내에 |
|
| V/f는 구부러집니다 |
V / F 곡선 타입 : 직선, 다중 지점, 전력 기능, V / F 분리 ; |
|
| 경사로를 주는 주파수 |
선인 지원과 S 곡선 가속과 감속 ; |
|
| 직류버스 전압 제어기 |
과전압 실속 제어 : 전압 결점을 건너 뛰기를 회피하기 위해 출력 주파수를 조정함으로써 모터의 발전을 제한하세요 ; |
|
| 운반기 주파수 | 1kHz~12kHz (타입에 의존하는 바리스) | |
| 개시법 |
직접적 스타트는 (통조림으로 만들고 중첩된 DC 브레이크입니다) ; 속도 추적 시작 |
|
일반 어플리케이션에서 유명한 브랜드 vfd를 대체하세요.
![]()
취침등 기능
| 41이지 그룹 취침등 기능 | ||||
| P41.00 | 방식을 잠들게 하고 선택을 깨우세요 |
유닛의 디지트 : 슬립 모드 선택
|
010 | ☆ |
| P41.01 | 주파수에 의한 수면 세팅 값 | 0.00Hz~600HZ, 가치가 이 가치 이하이면 그것이 잠을 잘 것입니다 | 0.00Hz | ☆ |
| P41.02 | 주파수에 의해 한계를 깨우세요 | 0.00hz~600.00hz,, 가치가 이 가치 보다 더 크면 그것이 깨어날 것입니다 |
0.00Hz |
☆ |
|
주파수 수면과 주파수 기상을 선택할 때, P41.01 < P41=""> 정보원이 PID 설정인 것이에 의해 져야하고 주파수 기상이 PID 셧다운 작동으로 설정되어야 합니다 : P40.39 = 1. |
||||
| P41.03 | 압력에 의한 수면 세팅 값 | 0~100.0% | 0.0% | ☆ |
| P41.04 | 압력에 의해 한계를 깨우세요 | 0.~100.0% | 0.0% | ☆ |
| P41.05 | 수면 지연 시간 | 0.0s~6000.0s | 0.0s | ☆ |
| P41.06 | 상향 딜레이를 깨우세요 | 0.0s~6000.0s | 0.0s | ☆ |
| P41.07 | 수면 감속시간 |
세팅 값은 P03.16에 의해 결정합니다 |
0.00s | ☆ |
추천된 제품

